SERIE DE CAMBIADORES RÁPIDOS – QCA-50 Un dispositivo de cambio rápido en el extremo de un robot



Categoría principal
Cambiador de herramientas robótico / Cambiador de herramientas de extremo de brazo (EOAT) / Sistema de cambio rápido / Cambiador automático de herramientas / Interfaz de herramientas robóticas / Lado del robot / Lado de la pinza / Flexibilidad de herramientas / Liberación rápida / Cambiador de herramientas neumático / Cambiador de herramientas eléctrico / Cambiador de herramientas hidráulico / Cambiador de herramientas de precisión / Mecanismo de bloqueo de seguridad / Efector final / Automatización / Eficiencia de cambio de herramientas / Intercambio de herramientas / Automatización industrial / Herramientas robóticas de extremo de brazo / Diseño modular
Solicitud
Las herramientas de extremo de brazo (EOAT) se utilizan ampliamente en industrias como la fabricación de automóviles, la electrónica 3C, la logística, el moldeo por inyección, el envasado de alimentos y productos farmacéuticos, y el procesamiento de metales. Sus principales funciones incluyen la manipulación de piezas, la soldadura, la pulverización, la inspección y el cambio rápido de herramientas. Las EOAT mejoran significativamente la eficiencia de la producción, la flexibilidad y la calidad del producto, lo que las convierte en un componente esencial de la automatización industrial moderna.
Característica
Alta precisión
La pinza de ajuste del pistón desempeña la función de posicionamiento, lo que proporciona una alta precisión de posicionamiento repetitivo. Un millón de pruebas de ciclos demuestran que la precisión real es muy superior al valor recomendado.
Alta resistencia
El pistón de bloqueo, con un gran diámetro de cilindro, ofrece una gran fuerza de bloqueo. El dispositivo rápido de extremo del robot SCIC posee una gran capacidad antitorsión. Al bloquear, no se producen vibraciones debido al movimiento a alta velocidad, lo que evita fallos de bloqueo y garantiza una precisión de posicionamiento repetida.
Rendimiento alto
Se adoptan el mecanismo de bloqueo con diseño de superficie cónica múltiple, componentes de sellado de larga duración y una sonda de contacto elástica de alta calidad para garantizar el contacto cercano del módulo de señal.



Parámetro de especificación
| Serie de cambio rápido | ||||
| Modelo | Carga útil máxima | Ruta del gas | Fuerza de bloqueo a 80 psi (5,5 bar) | Peso del producto |
| QCA-05 | 5 kilos | 6-M5 | 620N | 0,4 kilogramos |
| QCA-05 | 5 kilos | 6-M5 | 620N | 0,3 kilogramos |
| QCA-15 | 15 kilos | 6-M5 | 1150N | 0,3 kilogramos |
| QCA-25 | 25 kilos | 12-M5 | 2400N | 1,0 kilogramos |
| QCA-35 | 35 kilos | 8-G1/8 | 2900N | 1,4 kilos |
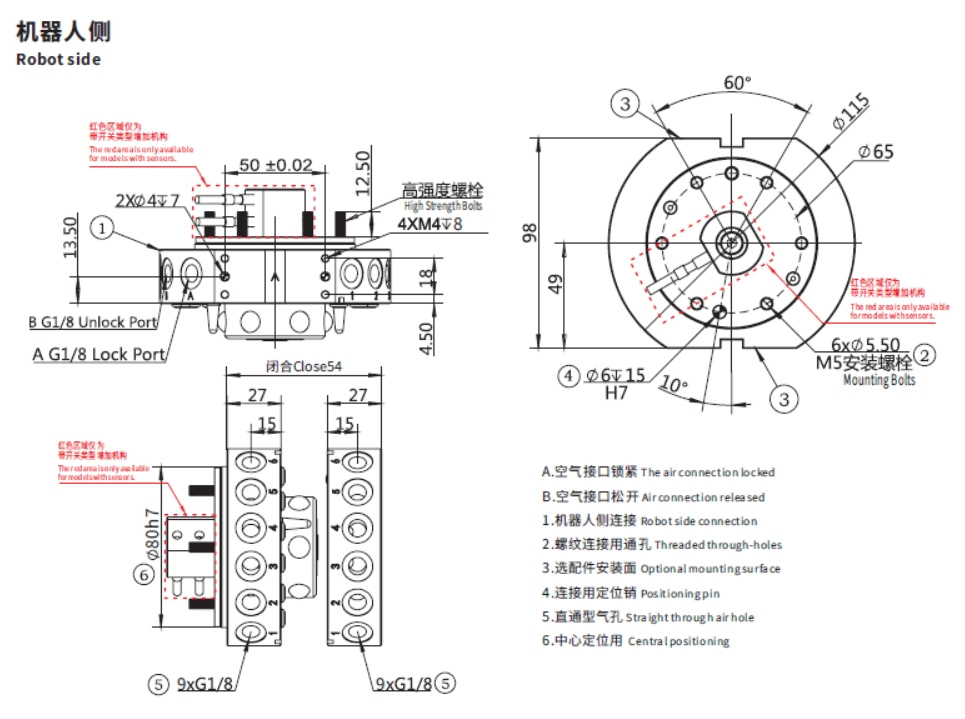
| QCA-50 | 50 kilos | 9-G1/8 | 4600N | 1,7 kilos |
| QCA-S50 | 50 kilos | 8-G1/8 | 5650N | 1,9 kilos |
| QCA-100 | 100 kilos | 7-G3/8 | 12000N | 5,2 kilogramos |
| QCA-S100 | 100 kilos | 5-G3/8 | 12000N | 3,7 kilos |
| QCA-S150 | 150 kilos | 8-G3/8 | 12000N | 6,2 kilos |
| QCA-200 | 300 kilos | 12-G3/8 | 16000N | 9,0 kilogramos |
| QCA-200D1 | 300 kilos | 8-G3/8 | 16000N | 9,0 kilogramos |
| QCA-S350 | 350 kilos | / | 31000N | 9,4 kilos |
| QCA-S500 | 500 kilos | / | 37800N | 23,4 kilogramos |

Lado del robot

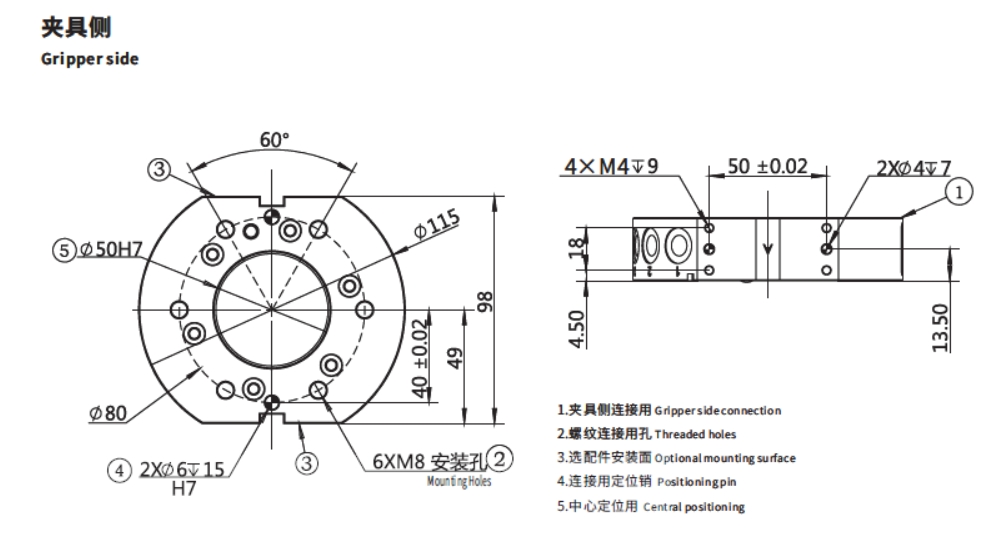
Lado de la pinza

Interruptor de correa lateral del robot
Módulo aplicable
Tipo de módulo
| Nombre del producto | Modelo | PN | Voltaje de trabajo | Corriente de trabajo | Conector | Conector PN |
| Módulo de señal lateral del robot | QCSM-15R2 | 7.Y00468 | 24 V | 2,5 A | D-Sub15R2-1000① | 1.Y10080 |
| Módulo de señal lateral de la pinza | QCSM-15G2 | 7.Y00469 | 24 V | 2,5 A | D-Sub15G2-1000① | 1.Y10081 |
| Módulo de señal lateral del robot | QCSM-08R | 7.Y00477 | 380 V | 30A | 3108A22-23S② | 1.Y10710 |
| Módulo de señal lateral de la pinza | QCSM-08G | 7.Y00478 | 380 V | 30A | 3108A22-23P② | 1.Y10711 |
| Módulo de señal lateral del robot | QCSM-19R | 7.Y00954 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Módulo de señal lateral del robot | QCSM-19R | 7.Y00954 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Módulo de señal lateral del robot | QCSM-19R1 | 7.Y02123 | 220 V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Módulo de señal lateral del robot | QCSM-19R1 | 7.Y02123 | 220 V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Módulo de señal lateral de la pinza | QCSM-19G | 7.Y00955 | 220 V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Módulo de señal lateral de la pinza | QCSM-19G | 7.Y00955 | 220 V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Módulo de señal lateral del robot | QCSM-26R | 7.Y00464 | 220 V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Módulo de señal lateral del robot | QCSM-26R | 7.Y00464 | 220 V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Módulo de señal lateral de la pinza | QCSM-26G | 7.Y00465 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Módulo de señal lateral de la pinza | QCSM-26G | 7.Y00465 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Módulo de señal lateral de la pinza | QCSM-21/26G | 7.Y02117 | 220 V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Módulo de señal lateral de la pinza | QCSM-21/26G | 7.Y02117 | 220 V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Módulo de señal lateral del robot | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3116F22-36S② | 1.Y13392 |
| Módulo de señal lateral del robot | QCSM-32R | 7.Y02095 | 220 V | 3A | MS3118F22-36S② | 1.Y13393 |
| Módulo de señal lateral de la pinza | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3116F22-36P② | 1.Y13394 |
| Módulo de señal lateral de la pinza | QCSM-32G | 7.Y02096 | 220 V | 3A | MS3118F22-36P② | 1.Y13395 |
①La longitud del cable es de 1 metro ②Solo unión, sin cable
Módulo de extensión neumática
| Nombre del producto | Modelo | PN | Ruta del gas | Agujero roscado |
| Módulo de extensión neumática del lado del robot | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Módulo de extensión neumática del lado de la pinza | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Módulo de extensión neumática del lado del robot | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Módulo de extensión neumática del lado de la pinza | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Módulo de extensión neumática del lado del robot | Cámara QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Módulo de extensión neumática del lado de la pinza | Cámara QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Módulo de extensión neumática del lado del robot | Cámara QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Módulo de extensión neumática del lado de la pinza | Cámara QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Módulo de extensión neumática autoproclamado del lado del robot | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Módulo de extensión neumático autoproclamado del lado de la pinza | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Módulo de extensión neumática del lado del robot | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Módulo de extensión neumática del lado de la pinza | Cámara QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Tipo de módulo de alta frecuencia
| Nombre del producto | Modelo | PN | Voltaje de trabajo | Corriente de trabajo |
| Módulo de señal del lado del robot | QCHFM-E14-C1R | 7.Y02003 | 1,4 kV | 5A |
| Módulo de señal del lado de la pinza | QCHFM-E14-C1G | 7.Y02004 | 1,4 kV | 5A |
Módulo de señal (interfaz de cable de red)
| Nombre del producto | Modelo | PN |
| Módulo de señal lateral del robot | QCSM-RJ45-06R | 7.Y02007 |
| Módulo de señal lateral de la pinza | QCSM-RJ45-06G | 7.Y02008 |
Módulo de potencia servo
| Nombre del producto | Modelo | PN |
| Módulo de alimentación del servo del lado del robot | QCSM-08R1 | 7.Y02080 |
| Módulo de servoalimentación del lado de la pinza | QCSM-08G1 | 7.Y02081 |
Módulo de señal servo
| Nombre del producto | Modelo | PN |
| Módulo de señal servo del lado del robot | QCSM-12R | 7.Y02082 |
| Módulo de señal servo del lado de la pinza | QCSM-12G | 7.Y02083 |
Módulo de aire y fluido autosellante
| Nombre del producto | Modelo | PN |
| Módulo de señal lateral del robot | QCWM-02R | 7.Y02049 |
| Módulo de señal lateral de la pinza | QCWM-02G | 7.Y02050 |
Nuestro negocio







