Brazos robóticos SCARA – Brazo robótico colaborativo Z-Arm-4160B





Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud
Los cobots SCIC Z-Arm son robots colaborativos ligeros de 4 ejes con motor de accionamiento integrado. Ya no requieren reductores como otros robots tradicionales, lo que reduce su coste en un 40 %. Los cobots SCIC Z-Arm pueden realizar funciones como impresión 3D, manipulación de materiales, soldadura y grabado láser, entre otras. Son capaces de mejorar considerablemente la eficiencia y la flexibilidad de su trabajo y producción.
Características

Alta precisión
Repetibilidad
±0,02 mm
Eje Z personalizado
0,1-0,8 m
Gran carga útil
Soporte de 4 kg
Máximo 5 kg
Mayor velocidad
Velocidad lineal máxima 2 m/s
(Carga del soporte 5 kg)
Brazo robótico de 4 ejes de gran alcance y alta precisión, fácil de usar.
Alta precisión
Repetibilidad: ±0,02 mm
Gran envergadura de brazos
Eje J1: 325 mm,Eje J2: 275 mm
Eje Z personalizado
El recorrido ascendente y descendente se puede personalizar entre 0,1 m y 0,8 m.
Ahorro de espacio
La unidad/controlador está integrado
Simple y fácil de usar
El recién llegado que no conoce el brazo robótico también puede utilizarlo fácilmente, la interfaz se abre.
Alta velocidad
Su velocidad es de 2000 mm/s bajo una carga de 4 kg.

Productos relacionados



Parámetro de especificación
El SCIC Hitbot Z-Arm 4160B, diseñado por SCIC Tech, es un robot colaborativo ligero, fácil de programar y usar, compatible con SDK. Además, cuenta con detección de colisiones, lo que significa que se detiene automáticamente al tocar a una persona, lo que permite una colaboración inteligente entre humanos y máquinas con alta seguridad.
| Brazo robótico colaborativo Z-Arm 4160B | Parámetros |
| Longitud del brazo de 1 eje | 325 mm |
| Ángulo de rotación de 1 eje | ±90° |
| Longitud del brazo de 2 ejes | 275 mm |
| Ángulo de rotación de 2 ejes | ±164° Opcional: 15-345 grados |
| Recorrido del eje Z | 410 La altura se puede personalizar |
| Rango de rotación del eje R | ±1080° |
| Velocidad lineal | 2000 mm/s (carga útil 4 kg) |
| Repetibilidad | ±0,02 mm |
| Carga útil estándar | 4 kilos |
| Carga útil máxima | 5 kilos |
| Grado de libertad | 4 |
| Fuente de alimentación | 220 V/110 V 50-60 Hz se adapta a una potencia máxima de 48 V CC de 960 W |
| Comunicación | Ethernet |
| Capacidad de expansión | El controlador de movimiento integrado proporciona 24 E/S + expansión debajo del brazo |
| El eje Z se puede personalizar en altura. | 0,1 m ~ 0,8 m |
| Enseñanza del arrastre en el eje Z | / |
| Interfaz eléctrica reservada | Configuración estándar: 24 cables de 23 AWG (sin blindaje) desde el panel del zócalo a través de la cubierta del brazo inferior Opcional: 2 tubos de vacío φ4 a través del panel de zócalo y la brida |
| Pinzas eléctricas HITBOT compatibles | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Respirando luz | / |
| Rango de movimiento del segundo brazo | Estándar: ±164° Opcional: 15-345 grados |
| Accesorios opcionales | / |
| Entorno de uso | Temperatura ambiente: 0-45°C Humedad: 20-80%RH (sin escarcha) |
| Entrada digital del puerto de E/S (aislada) | 9+3+extensión de antebrazo (opcional) |
| Salida digital del puerto de E/S (aislada) | 9+3+extensión de antebrazo (opcional) |
| Entrada analógica del puerto de E/S (4-20 mA) | / |
| Salida analógica del puerto de E/S (4-20 mA) | / |
| Altura del brazo robótico | 860 mm |
| Peso del brazo robótico | Carrera de 410 mm, peso neto 36,5 kg |
| Tamaño de la base | 250 mm x 250 mm x 15 mm |
| Distancia entre los orificios de fijación de la base | 200 mm x 200 mm con cuatro tornillos M8 x 20 |
| Detección de colisiones | √ |
| Enseñanza del drag | √ |
Selección ideal para tareas de montaje ligeras
Z-Arm XX60B es un brazo robótico de 4 ejes con un gran alcance, que ocupa un área pequeña, muy adecuado para colocar en la estación de trabajo o dentro de la máquina, es una selección ideal para tareas de ensamblaje liviano.


Ligero con gran ángulo de rotación

El peso del producto es de aproximadamente 36,5 kg, su carga máxima puede ser de hasta 5 kg, el ángulo de rotación de 1 eje es de ±90°, el ángulo de rotación de 2 ejes es de ±164°, el rango de rotación del eje R puede ser de hasta ±1080°.
Gran envergadura de brazo, amplia aplicación

El brazo Z XX60B tiene una gran longitud de brazo, la longitud de 1 eje es de 325 mm, la longitud de 2 ejes es de 275 mm y su velocidad lineal puede ser de hasta 2000 mm/s con una carga de 4 kg.


Flexible para implementar, rápido para cambiar
El Z-Arm XX60B tiene las características de ser liviano, ahorrar espacio y ser flexible para implementar, es adecuado para implementar en muchas aplicaciones y no cambiaría el diseño de producción anterior, incluida la secuencia de proceso de cambio rápido y lotes pequeños completos de producción, etc.
ArrastreTeaching para completar el programa

El software se basa en diseño gráfico, proporciona punto, señal de salida, pinza eléctrica, bandeja, retardo, subproceso, reinicio y otros módulos funcionales básicos, los usuarios pueden arrastrar el módulo para controlar el brazo del robot en el área de programación, la interfaz es simple, pero la función es poderosa.
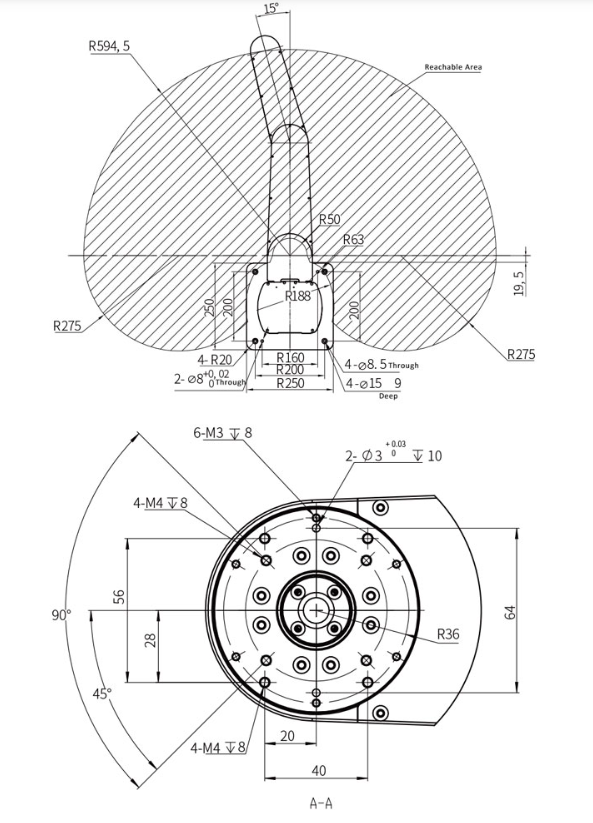
Rango de movimiento Versión M1 (Girar hacia afuera)
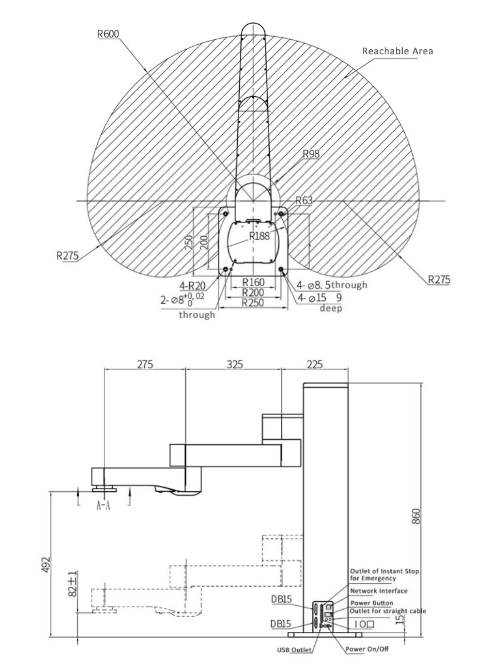
Recomendación del conector DB15

Modelo recomendado: Macho chapado en oro con carcasa de ABS YL-SCD-15M Hembra chapada en oro con carcasa de ABS YL-SCD-15F
Descripción del tamaño: 55 mm x 43 mm x 16 mm
(Consulte la Figura 5)
Diagrama del entorno de uso externo del brazo robótico

Nuestro negocio


Categorías de productos
-

SERIE CAMBIADOR RÁPIDO – QC-150 Redondo Manua...
-

ROBOTS DE ELEVACIÓN – Robot de elevación rotatorio SJV...
-

CARRETILLA ELEVADORA INTELIGENTE – SFL-CDD14-CE Láser SLAM ...
-

SERIE TM AI COBOT – TM12M Cobot con IA de 6 ejes
-

SERIE TM AI COBOT – TM16M Cobot con IA de 6 ejes
-

SERIE DE PINZAS ELÉCTRICAS HITBOT – Z-EFG-30 Paral...