Pinzas eléctricas paralelas serie HITBOT Z-EFG-20


Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud
Las pinzas robóticas SCIC de la serie Z-EFG son de tamaño compacto e incorporan un servosistema que permite un control preciso de la velocidad, la posición y la fuerza de sujeción. El innovador sistema de agarre SCIC para soluciones de automatización le permitirá abrir nuevas posibilidades para automatizar tareas que nunca imaginó.

Característica

·Controlador incorporado
·Carrera y fuerza de agarre ajustables.
·El extremo se puede reemplazar para adaptarse a diversas necesidades.
·Recoger objetos frágiles y deformables como huevos,tubos de ensayo, anillos, etc.
·Aplicar en escenas sin fuente de aire (por ejemplo, laboratorio, hospital).
Precisión de control, sujeción en espacios pequeños, sujeción rápida y estable
Gran fuerza de sujeción
La carrera total es de 20 mm y la fuerza de sujeción es de 80 N.
Precisión para controlar
Repetibilidad: ±0,02 mm
Larga vida útil
Decenas de millones de ciclos, más allá de la pinza neumática
El controlador está integrado
Ocupa poco espacio y es fácil de integrar.
Modo de control
Pulso, controladores de E/S para opción
Sujeción suave
Puede sujetar objetos frágiles.




Parámetro de especificación
| Modelo n.° Z-EFG-20 | Parámetros |
| Total ataque | 20 mm |
| Fuerza de agarre | 30~80 N |
| Repetibilidad | ±0,02 mm |
| Peso de agarre recomendado | 0,8 kilos |
| Transmisión modo | Cremallera + Guía de rodillos cruzados |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,45 s |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80(Sin escarcha) |
| Modo de movimiento | Dos dedos se mueven horizontalmente |
| Control de accidentes cerebrovasculares | Ajustable |
| Ajuste de la fuerza de sujeción | Ajustable |
| Peso | 0,458 kilogramos |
| Dimensiones(Largo x Ancho x Alto) | 44*30*124,7 mm |
| Ubicación del controlador | Incorporado |
| Fuerza | 5W |
| Tipo de motor | CC sin escobillas |
| Corriente máxima | 1A |
| Tensión nominal | 24 V |
| Corriente de espera | 0,2 A |
| Resistente a impactos / vibraciones | 98 m/s |
| Diámetro del motor | 28 mm |
* Fuerza de agarre Z-EFG-20: La fuerza de agarre se puede ajustar agregando un material de deformación controlada al frente del accesorio, que se obtiene de acuerdo con la curva correspondiente de deformación y fuerza.
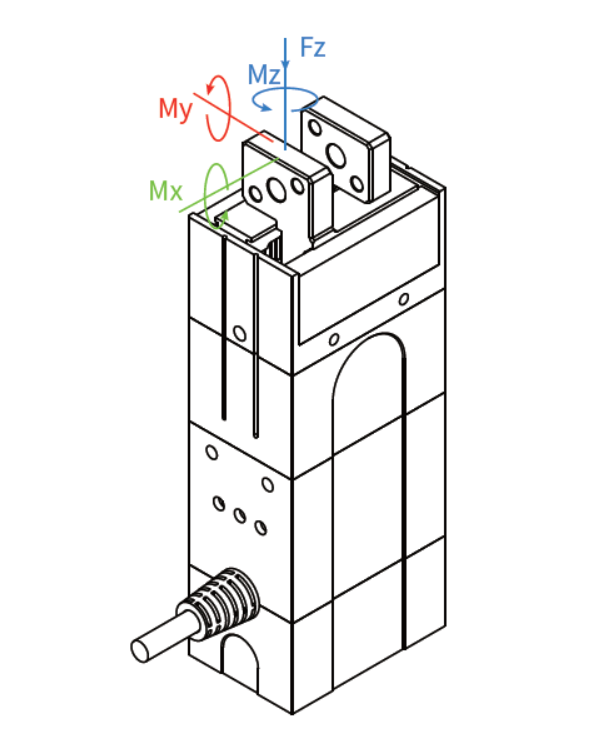
| Carga estática admisible en dirección vertical | |
| Fz: | 150 N |
| Par admisible | |
| Mx: | 2,1 Nm |
| Mi: | 2,34 Nm |
| Sra.: | 2 Nm |
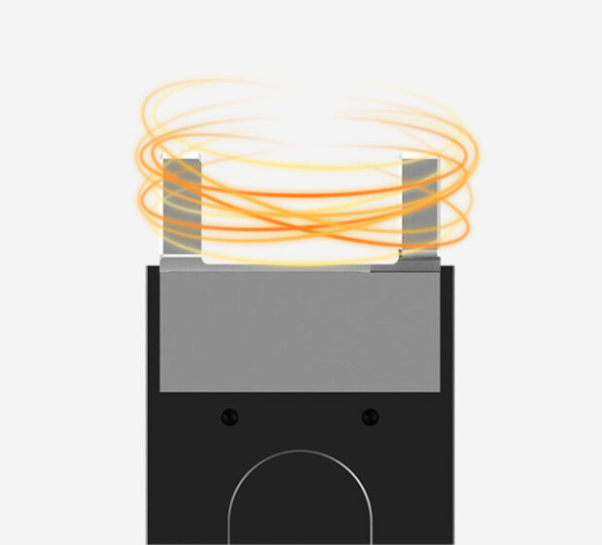
Gran fuerza de sujeción, control de fuerza de precisión

La pinza eléctrica adopta un diseño de transmisión especial y compensación de cálculo de conducción, su fuerza de sujeción es de 80 N continuamente ajustable, la carrera total es de 20 mm y su repetibilidad es de ±0,02 mm.
Modo de movimiento y recorrido ajustables
El movimiento de la pinza eléctrica pertenece al movimiento paralelo de dos dedos, su tiempo más corto de carrera única es de solo 0,45 s, peso de sujeción ≤0,8 kg, puede cumplir con el requisito de sujeción estable para la línea de producción.
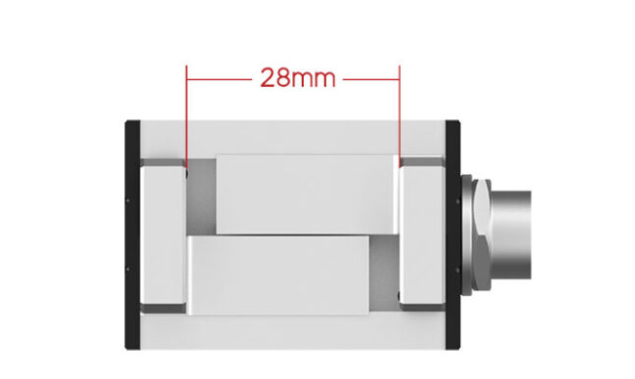
Estructura compacta, flexible para instalar.

El tamaño de Z-EFG-20 es L40*W30*H124.7mm, su estructura es compacta, admite más de cinco modos de instalación, su controlador está integrado, ocupando poco espacio, lo que permite realizar fácilmente varias tareas de sujeción.


Conducción y controlador integrados, sujeción suave

La cola del Z-EFG-20 se puede cambiar fácilmente, los clientes pueden sujetar los objetos solicitados, diseñar la cola y mantener la pinza eléctrica para completar las tareas de sujeción en la mayor medida posible.
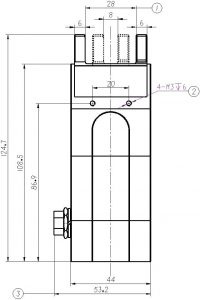
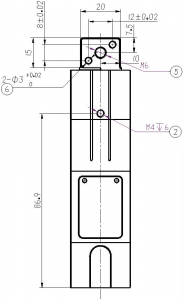
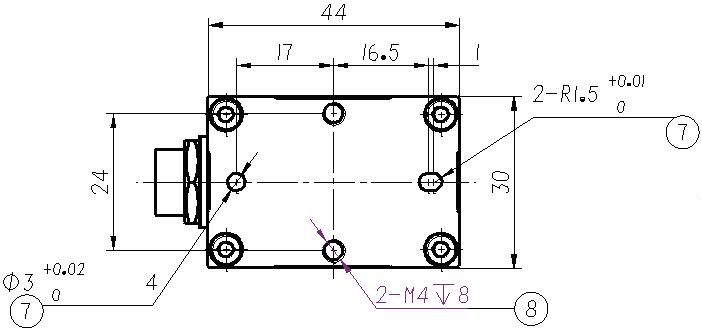
Diagrama de instalación de dimensiones
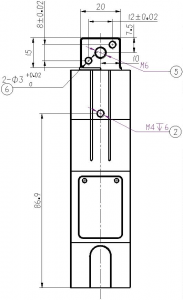
① Recorrido de movimiento de los dedos de la pinza
② Posición de montaje lateral (orificio roscado)
③ Ubicación del cableado del enchufe de aviación
④ Posición de la fuerza de ajuste de la pinza (izquierda) y luz indicadora (derecha)
⑤ Posición de instalación de la pinza (orificio roscado)
⑥ Posición de instalación de la pinza (orificio del pasador)
⑦ Posición de montaje inferior (orificio del pasador)
⑧ Posición de montaje inferior ((orificio roscado)
Nuestro negocio







