Pinzas eléctricas HITBOT – Pinza eléctrica rotativa Z-ERG-20




Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
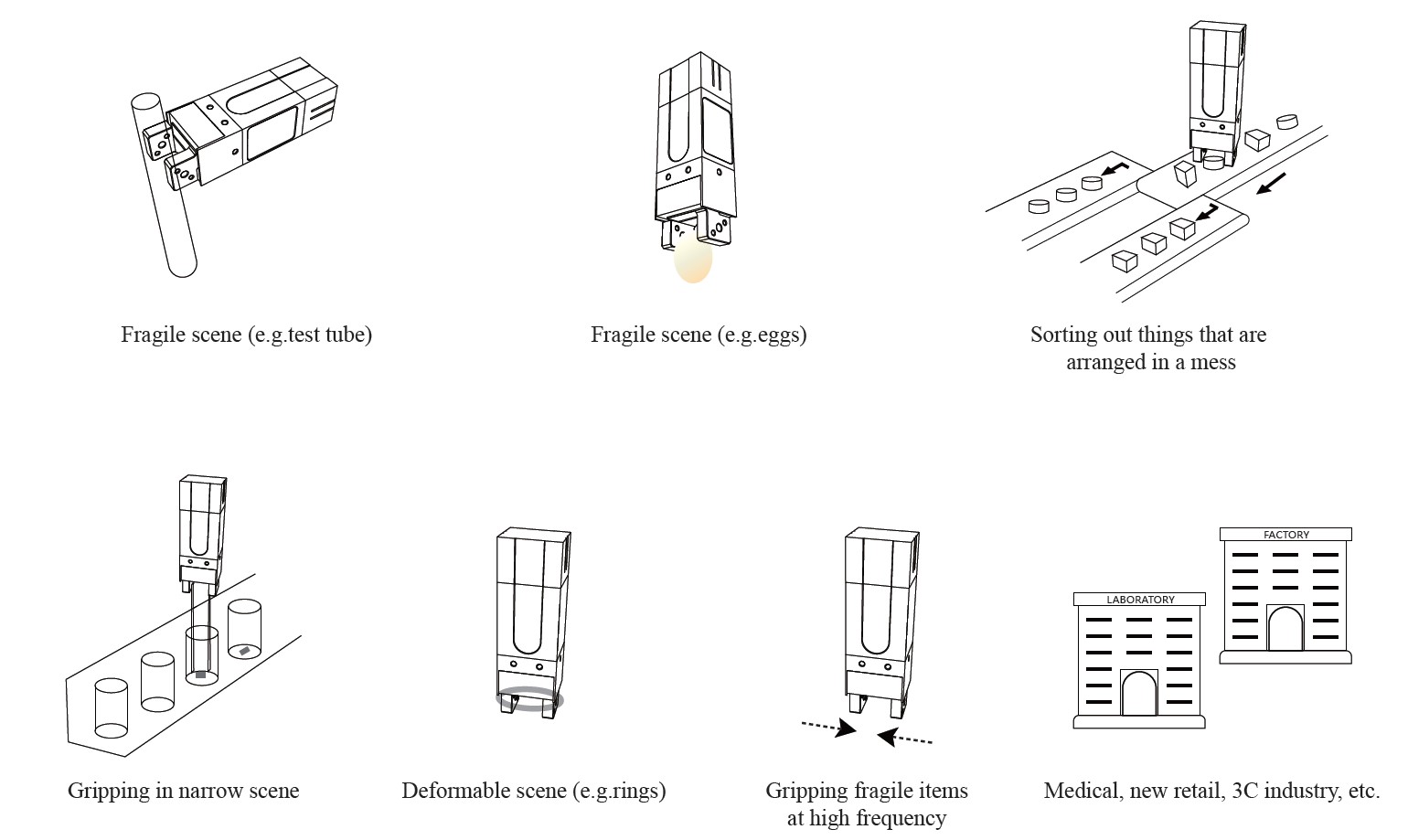
Solicitud
Las pinzas robóticas SCIC de la serie Z son de tamaño compacto e incorporan un servosistema que permite un control preciso de la velocidad, la posición y la fuerza de sujeción. El innovador sistema de agarre SCIC para soluciones de automatización le permitirá abrir nuevas posibilidades para automatizar tareas que nunca imaginó.
Característica

· Admite rotación infinita y rotación relativa, sin anillo colector, bajo costo de mantenimiento.
·La fuerza de rotación y agarre, la posición y la velocidad se pueden controlar con precisión.
·Larga vida útil, múltiples ciclos, mejor rendimiento que la pinza preneumática.
·Controlador incorporado: ocupa poco espacio y es fácil de integrar.
·Modo de control: admite control de bus Modbus y E/S



Parámetro de especificación
El manipulador Z-ERG-20 facilita el trabajo con personas y permite un agarre suave. La pinza eléctrica está altamente integrada y ofrece numerosas ventajas:
●Admite rotación infinita y rotación relativa, sin anillo colector, bajo costo de mantenimiento.
●Se pueden controlar con precisión la rotación, la fuerza de sujeción, la perforación y la velocidad.
●Larga vida útil: decenas de millones de círculos, mejor que los compresores de aire.
●Controlador incorporado, para ahorrar espacio, fácil de integrar.
●Modo de control: admite Modbus y control de E/S.
| Modelo n.° Z-ERG-20 | Parámetros |
| Accidente cerebrovascular total | 20 mm ajustable |
| Fuerza de agarre | 10-35 N ajustable |
| Repetibilidad | ±0,2 mm |
| Peso de agarre recomendado | ≤0,4 kg |
| Modo de transmisión | Cremallera + Guía lineal |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,20 s |
| Par máximo de rotación | 0,3 Nm |
| Velocidad máxima de rotación | 240 RPM |
| Rango de rotación | Rotación infinita |
| Juego giratorio | ±1° |
| Peso | 1,0 kilogramos |
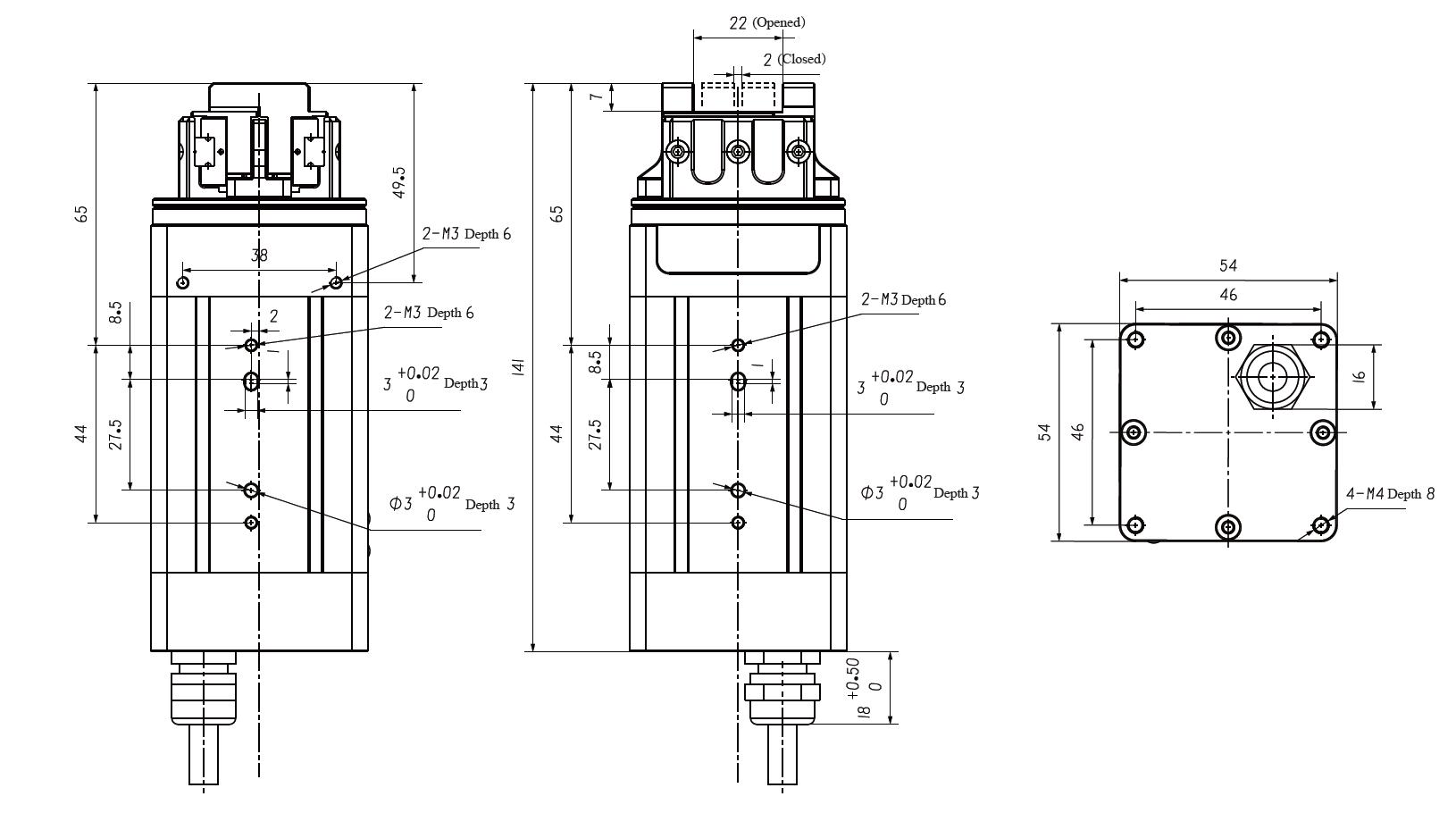
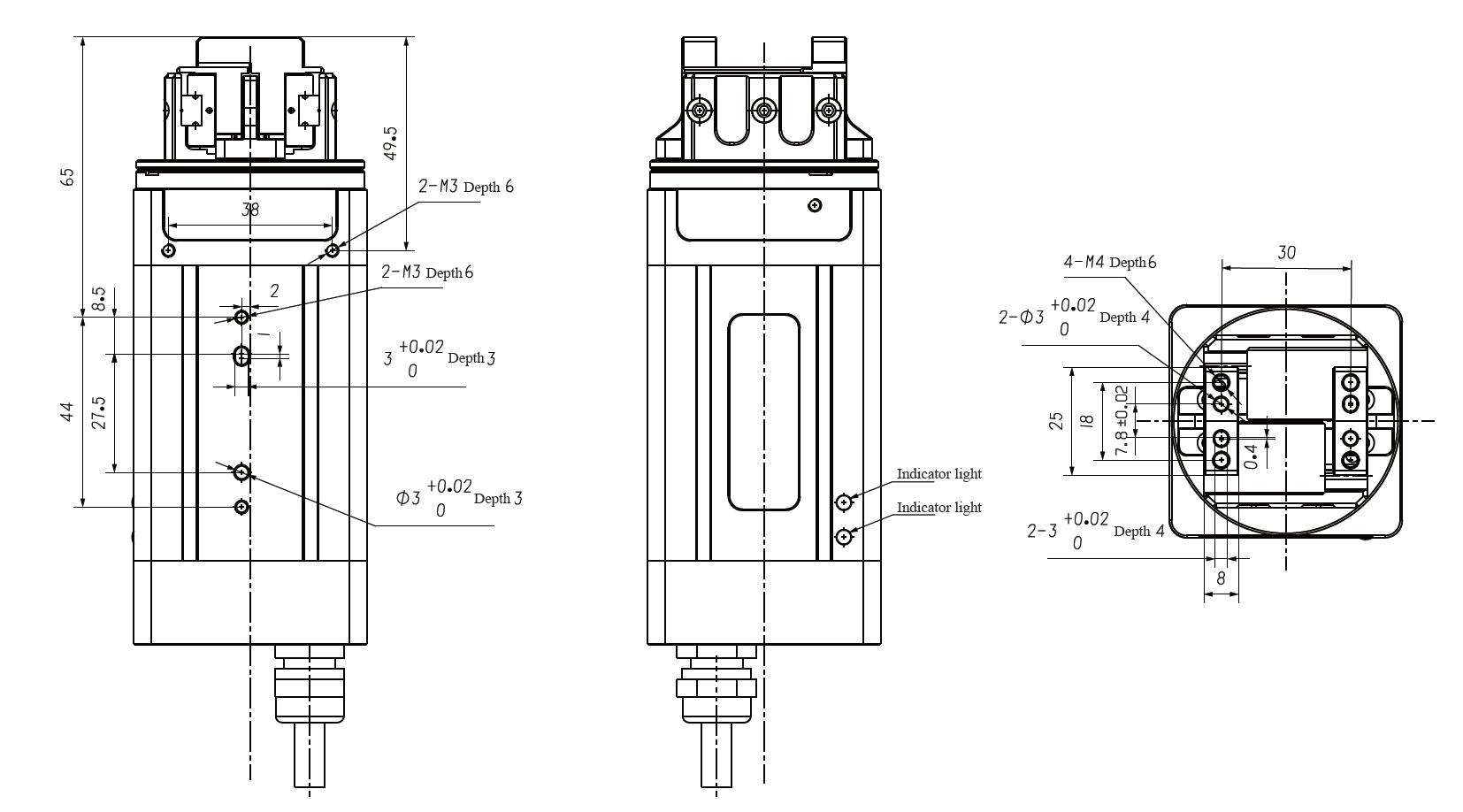
| Dimensiones | 54*54*141 mm |
| Voltaje de funcionamiento | 24 V ± 10 % |
| Corriente nominal | 1,5 A |
| Corriente máxima | 3A |
| Fuerza | 50 W |
| Clase de protección | IP20 |
| Tipo de motor | Servomotor |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80 (Sin escarcha) |
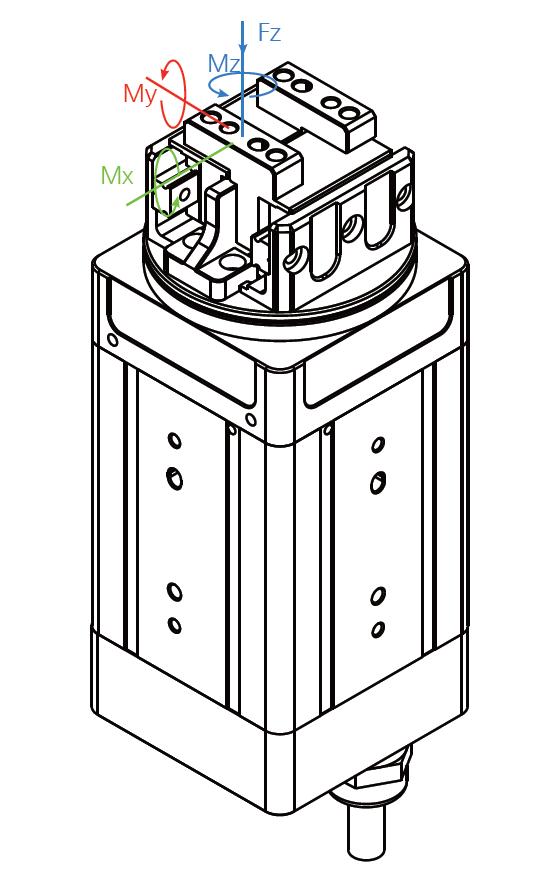
| Carga estática admisible en dirección vertical | |
| Fz: | 100 N |
| Par admisible | |
| Mx: | 1,35 Nm |
| Mi: | 0,8 Nm |
| Sra.: | 0,8 Nm |
Desplazamiento del centro de gravedad de la carga
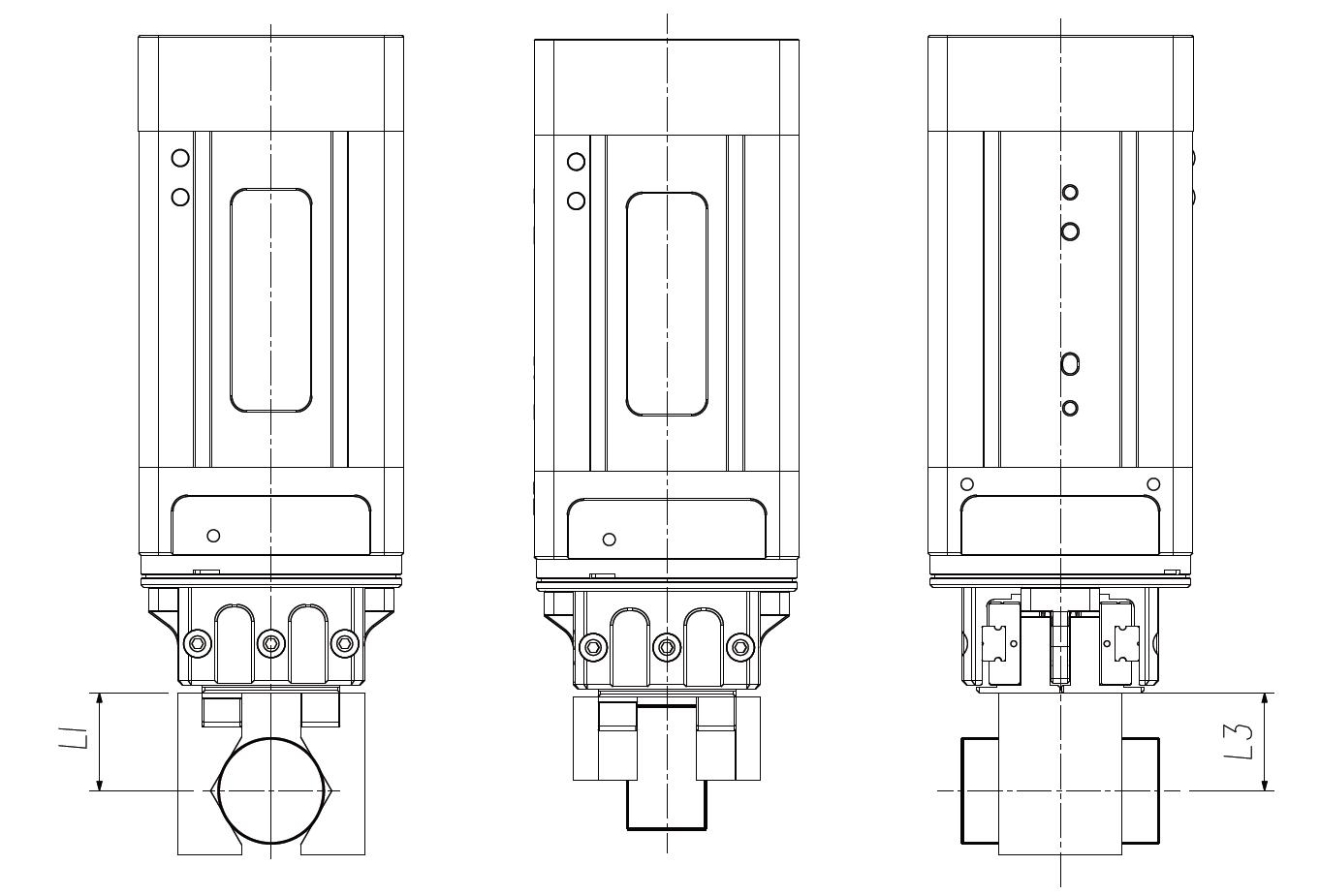
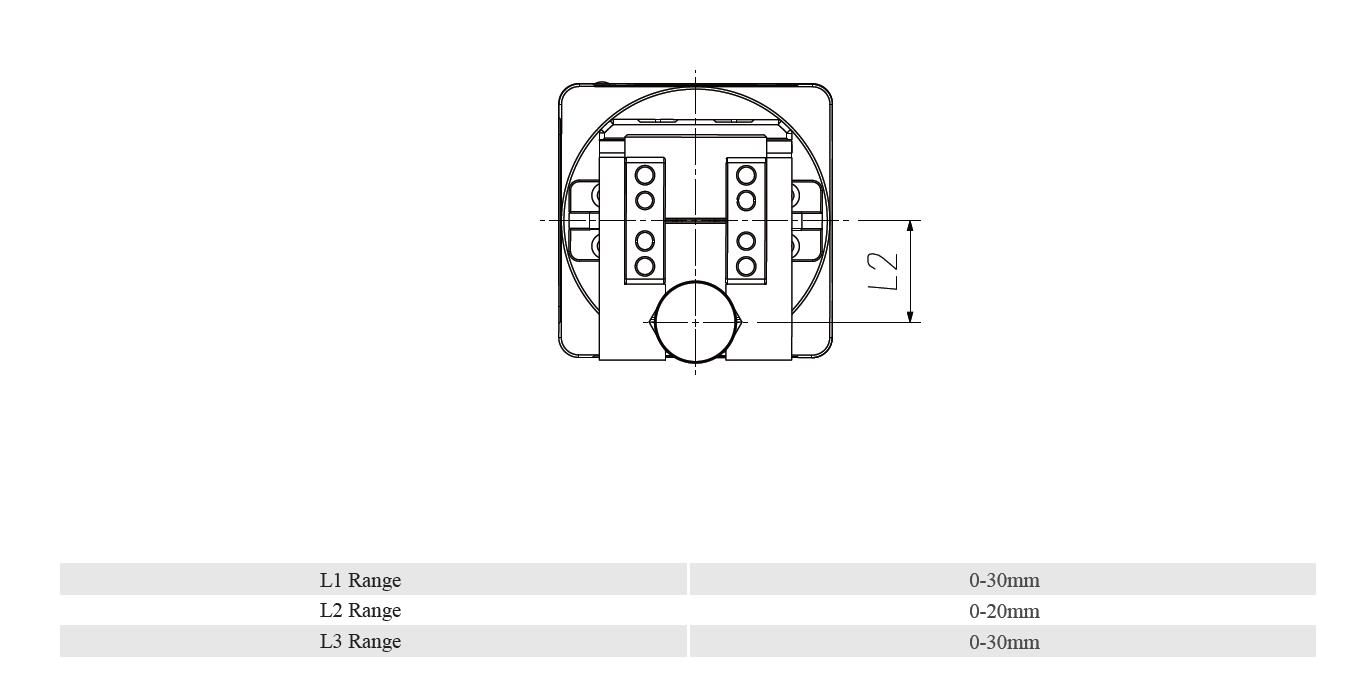
Diagrama de instalación de dimensiones
① RKMV8-354 Conector de aviación de cinco núcleos a RKMV8-354
② La carrera de la pinza eléctrica es de 20 mm.
③ Posición de instalación, utilice dos tornillos M6 para conectar con la brida en el extremo del brazo del robot UR
④ Posición de instalación, posición de instalación del accesorio (tornillo M6)
⑤ Posición de instalación, posición de instalación del accesorio (3 orificios para pasadores cilíndricos)
Nuestro negocio







