Pinzas eléctricas HITBOT serie Z-ECG-10 de tres dedos




Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud

Característica

·Detección de caída de abrazadera, función de salida de área
·Fuerza, posición, velocidad controlables, control preciso mediante Modbus
·Pinza central de tres dedos
·Controlador integrado: tamaño reducido, fácil integración
·Modo de control: 485 (Modbus RTU), E/S
Pinza eléctrica de tres dedos para sujetar fácilmente objetos cilíndricos
Rendimiento alto
Fuerza de sujeción: 3-10 N,
Alta densidad energética
Precisión para controlar
Puede ser controlado por Modbus
Inteligente para la retroalimentación
Tiene la función de detección de caída de sujeción pf con salida regional.
Controlador incorporado
Cubre espacios reducidos y es fácil de integrar.
Modos de control múltiple
Admite E/S 485 (Modbus)
Pinza de tres dedos
Sujeción con tres dedos, adecuada para diversas ocasiones.




Parámetro de especificación
| Modelo n.° Z-ECG-10 | Parámetros |
| Total ataque | 10 mm |
| Fuerza de agarre | 3-10N |
| Repetibilidad | ±0,03 mm |
| Peso de agarre recomendado | Máx. 0,2 kg |
| Transmisión modo | Cremallera y piñón + carril guía de bolas |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,3 s |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80(Sin escarcha) |
| Blacklash | Un solo lado: 0,2 mm |
| Control de accidentes cerebrovasculares | Ajustable |
| Ajuste de la fuerza de sujeción | Ajustable |
| Peso | 0,5 kilos |
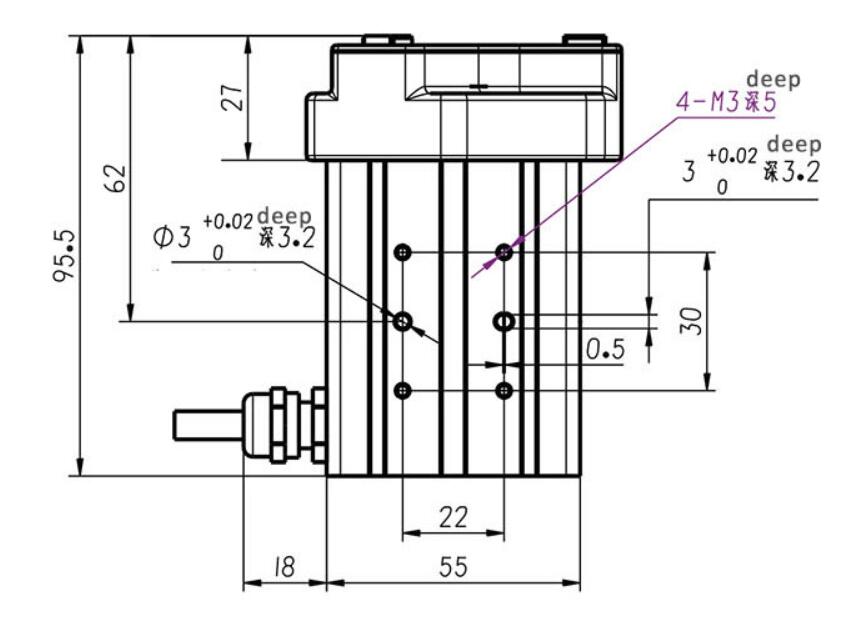
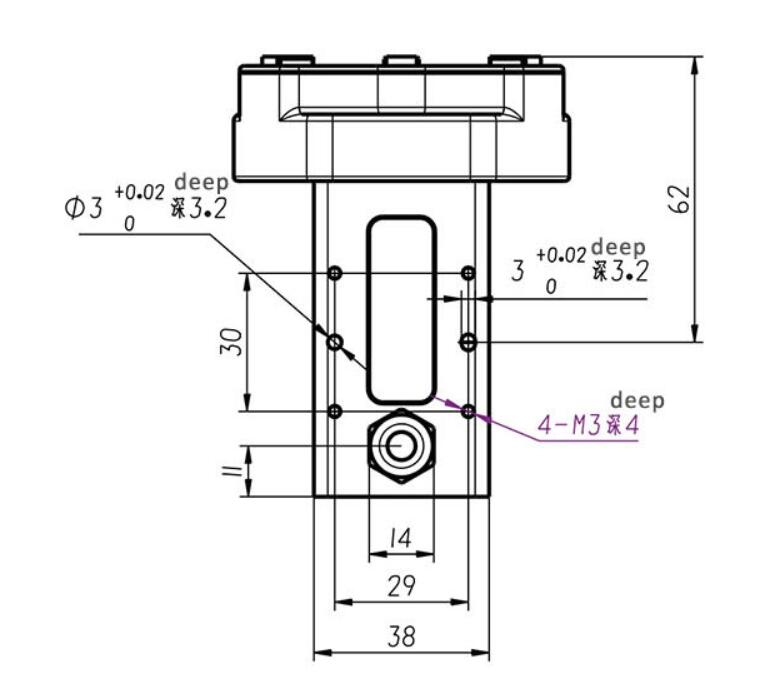
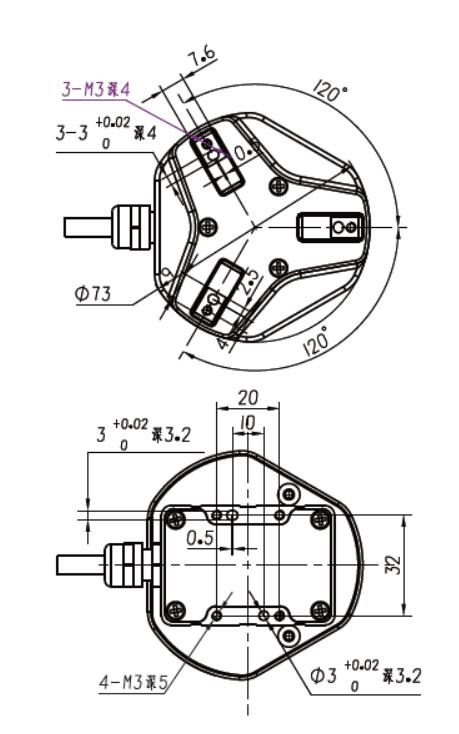
| Dimensiones(Largo x Ancho x Alto) | 73*73*95,5 mm |
| Grado de protección | IP20 |
| Tipo de motor | Servomotor eléctrico |
| Corriente máxima | 0,6 A |
| Tensión nominal | 24 V ±10 % |
| Corriente de espera | 0,3 A |
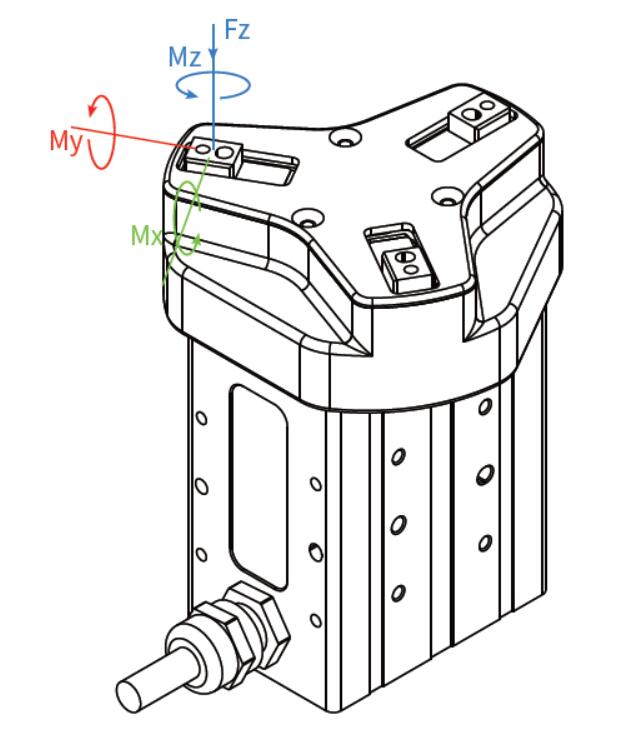
| Carga estática admisible en dirección vertical | |
| Fz: | 70N |
| Par admisible | |
| Mx: | 0,64 Nm |
| Mi: | 0,4 Nm |
| Sra.: | 0,48 Nm |
Precisión de posicionamiento, pinza de tres dedos
Pinza eléctrica de tres dedos Z-ECG-10, su repetibilidad es de ±0,03 mm, se sujeta con tres dedos y tiene la función de detección de caída de sujeción, salida regional, que puede ser mejor para sujetar objetos cilíndricos.


Controlador integrado, alta integración
Gran protección contra sobrecarga instantánea, para garantizar que la pinza eléctrica no tenga el sistema detenido u otra situación anormal. Tiene un controlador incorporado, se pueden controlar la fuerza, la broca y la velocidad, cubre un espacio de trabajo pequeño, es fácil de integrar.
Figura pequeña, flexible para instalar

Z-ECG-10 adopta el tipo de transmisión de cremallera y piñón + guía lineal, su tamaño es L73 * W73 * H109, el peso es de solo 0,65 kg, su estructura es compacta, admite múltiples tipos de instalación, fácil de completar muchas tareas de sujeción.


Rápido para reaccionar, control de fuerza preciso
La carrera más corta es de 0,3 s, la fuerza de sujeción es de 3-10 N, la carrera de sujeción es de 10 mm, el peso es de aproximadamente 0,2 kg, lo que puede lograr una alta precisión de sujeción.
Múltiples modos de control, fácil de operar

Z-ECG-10 se puede controlar con precisión mediante Modbus, es fácil de asignar, para utilizar la comunicación de E/S digital, solo necesita un cable para conectar ON/OFF, también es compatible con el sistema de control principal PLC.

Desplazamiento del centro de gravedad de la carga
Nuestro negocio


Categorías de productos
-

SERIE DE PINZAS ELÉCTRICAS HITBOT – Z-EFG-26 Paral...
-

PINZA SERVOELÉCTRICA DH ROBOTICS SERIE PGC –...
-

PINZAS ELÉCTRICAS HITBOT SERIE – Z-EFG-FS Colla...
-

PINZA SERVOELÉCTRICA DH ROBOTICS SERIE PGE –...
-

SERIE DE PINZAS ELÉCTRICAS HITBOT – Z-EFG-20 Paral...
-

PINZA SERVOELÉCTRICA DH ROBOTICS SERIE PGE –...