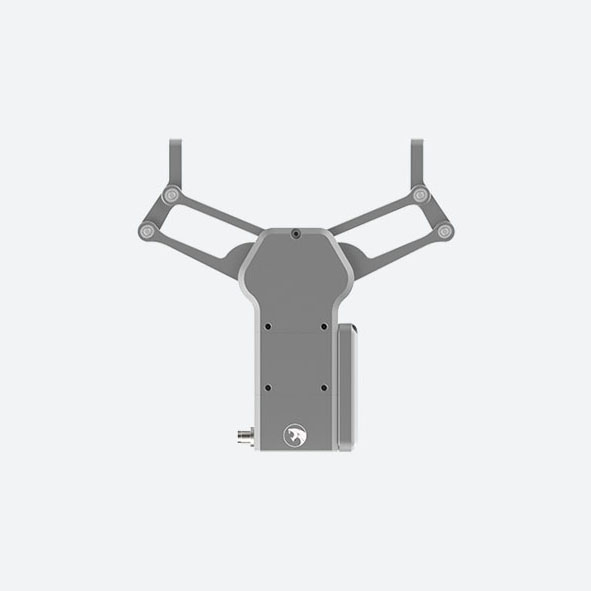
Pinzas eléctricas HITBOT serie Z-EFG-130 tipo Y



Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud
Las pinzas robóticas SCIC de la serie Z-EFG son de tamaño compacto e incorporan un servosistema que permite un control preciso de la velocidad, la posición y la fuerza de sujeción. El innovador sistema de agarre SCIC para soluciones de automatización le permitirá abrir nuevas posibilidades para automatizar tareas que nunca imaginó.

Característica
·Accidente cerebrovascular grande
·Fuerza de sujeción ajustable y carrera ajustable.
·Larga vida útil: decenas de millones de ciclos, superando a las garras de aire.
·Controlador integrado: tamaño pequeño, fácil integración.
·Control de bus EIA485, E/S
Fuerza de sujeción: 40-130 N, pinza eléctrica en forma de Y con carrera de 120 mm
Trazo largo
Carrera total: 120 mm
Modo de control
485 Modbus, EIA485, Control de bus
Fuerza de sujeción
Fuerza de sujeción ajustable 40-130 N
Controlador interior
Conversión de áreas pequeñas, fácil de integrar.
Control de precisión
Repetibilidad: ±0,02 mm
Sujeción suave
Puede sujetar objetos frágiles y deformables.

● Promover una revolución en la sustitución de pinzas neumáticas por pinzas eléctricas, primera pinza eléctrica con sistema servo integrado en China.
● Reemplazo perfecto para compresor de aire + filtro + válvula solenoide + válvula de mariposa + pinza neumática
● Vida útil de múltiples ciclos, consistente con el cilindro japonés tradicional



Parámetro de especificación
| Modelo n.° Z-EFG-130 | Parámetros |
| Total ataque | 120 mm |
| Fuerza de agarre | 40-130 N |
| Repetibilidad | ±0,02 mm |
| Peso de agarre recomendado | Máx. 1 kg |
| Transmisión modo | Tuerca de tornillo + varillaje |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,9 s |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80(Sin escarcha) |
| Modo de movimiento | Enlace |
| Control de accidentes cerebrovasculares | Ajustable |
| Ajuste de la fuerza de sujeción | Ajustable |
| Peso | 0,8 kilos |
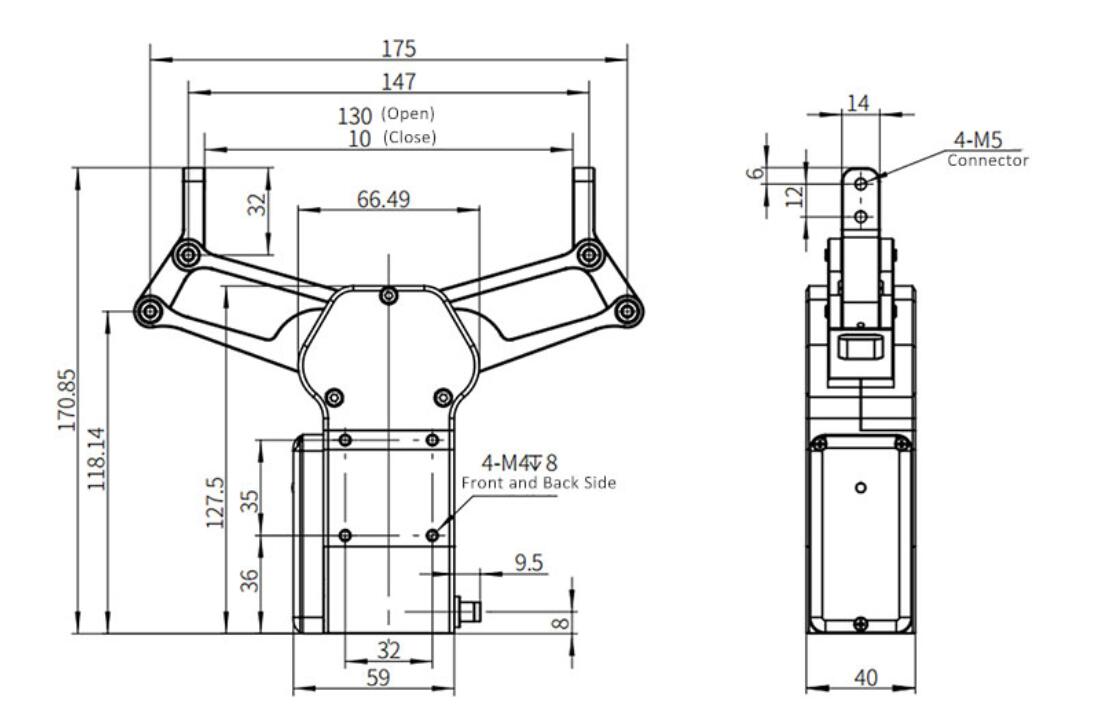
| Dimensiones(Largo x Ancho x Alto) | 171*187*40 mm (abierto) 218*66,5*40 m (cerrado) |
| Ubicación del controlador | Incorporado |
| Fuerza | 10 W |
| Tipo de motor | CC sin escobillas |
| Corriente máxima | 2A |
| Tensión nominal | 24 V |
| Corriente de espera | 0,4 A |
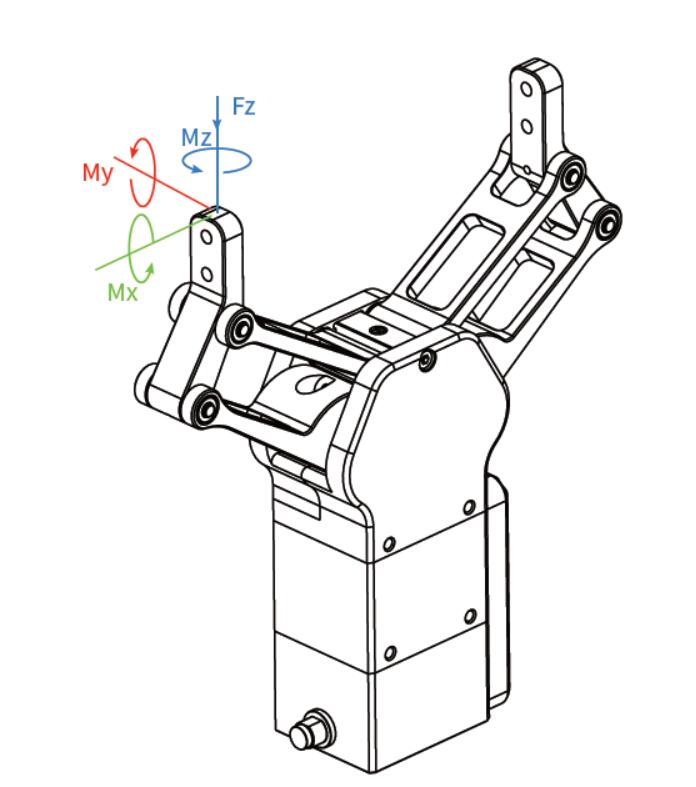
| Carga estática admisible en dirección vertical | |
| Fz: | 200 N |
| Par admisible | |
| Mx: | 2 Nm |
| Mi: | 2 Nm |
| Sra.: | 2 Nm |
Plug and Play, fácil de integrar
La pinza eléctrica Z-EFG-130 puede ser compatible con el brazo robótico colaborativo y tiene un sistema servo integrado en su interior, solo una pinza puede ser igual a compresor + filtro + válvula solenoide + válvula de aceleración + pinza de aire.


Carrera larga, gran compatibilidad
La carrera eficiente de la pinza eléctrica puede ser de hasta 120 mm, su tamaño de cierre es de 10 mm, la pinza eléctrica se puede utilizar para chips semiconductores, electrónica 3C y otras industrias de precisión, etc.
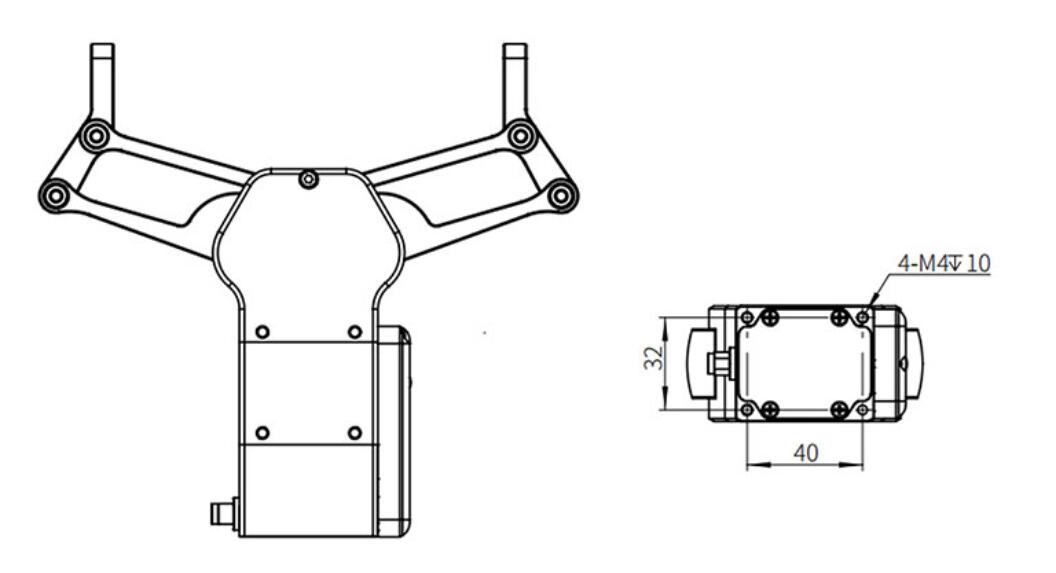
Tamaño pequeño, fácil de integrar.

El tamaño de apertura de Z-EFG-130 es 171*187*40 mm, el tamaño de cierre es 218*66,5*40 mm, es de estructura compacta, admite múltiples tipos de instalación, es un controlador en el interior y cubre un área pequeña.

Control de fuerza de precisión
La pinza eléctrica utiliza un diseño de transmisión especial y una compensación de algoritmo de accionamiento, la fuerza de sujeción es ajustable de 40 a 130 N, el peso de sujeción sugerido es ≤ 1 kg y puede lograr una repetibilidad de ± 0,02 mm.
Agarre adaptable, cola intercambiable

La pinza eléctrica Z-EFG-130 admite sujeción adaptativa, es más adecuada para objetos circulares, esféricos o con formas especiales, sus partes traseras se pueden cambiar fácilmente, los clientes pueden sujetar los objetos según sus necesidades.


Múltiples modos de control, fácil de operar

La pinza eléctrica se puede controlar con precisión mediante Modbus, su configuración es simple, para utilizar el protocolo de comunicación de E/S digital, solo necesita un cable para conectar con ON/OFF, es compatible con el sistema de control principal PLC.
Desplazamiento del centro de gravedad de la carga
Nuestro negocio







-300x2551-300x300.png)