Pinzas eléctricas HITBOT – Z-EFG-C35 Pinza eléctrica colaborativa




Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud
Las pinzas robóticas SCIC de la serie Z-EFG son de tamaño compacto e incorporan un servosistema que permite un control preciso de la velocidad, la posición y la fuerza de sujeción. El innovador sistema de agarre SCIC para soluciones de automatización le permitirá abrir nuevas posibilidades para automatizar tareas que nunca imaginó.

Característica

·Detección de caída de pinza, función de salida de área
·La fuerza, la posición y la velocidad se pueden controlar con precisión a través de Modbus
·Larga vida: decenas de millones de ciclos, superando a las garras de aire.
·Controlador integrado: tamaño reducido, fácil integración
·Modo de control: 485 (Modbus RTU), E/S
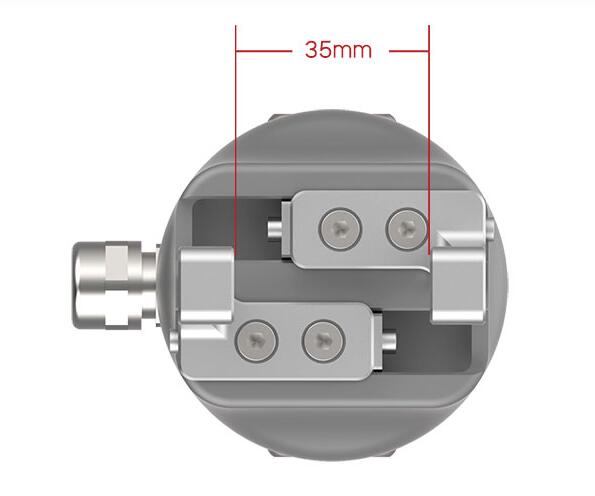
Carrera de 35 mm y fuerza de sujeción de 50 N. Compatible con brazos robóticos de 6 ejes.
Frecuencia alta
El tiempo de carrera más corto es de 0,5 s.
Alta precisión
La repetibilidad es de ±0,03 mm
Alta carga útil
Peso de sujeción recomendado ≤1 kg
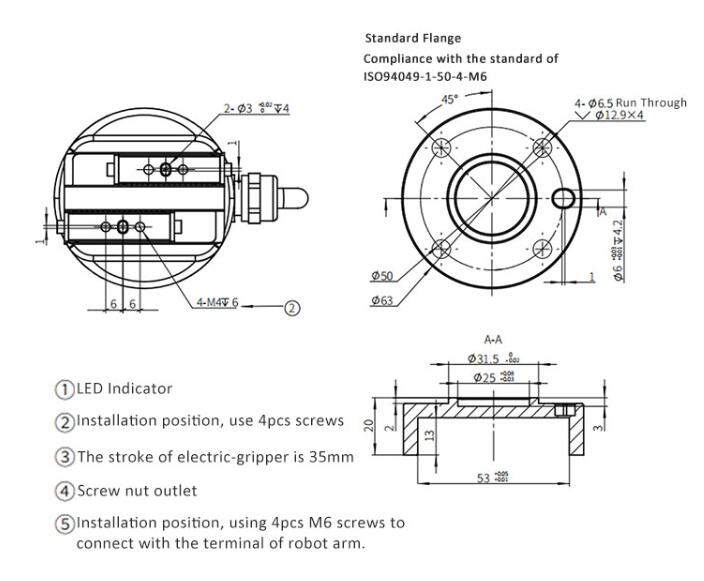
Conectar y usar
Pinza eléctrica especial para robot de 6 ejes
Cola intercambiable
Su extremo trasero es intercambiable para adaptarse a diferentes requisitos.
Sujeción suave
Puede sujetar objetos frágiles y deformados.

● Promover una revolución en la sustitución de pinzas neumáticas por pinzas eléctricas, primera pinza eléctrica con sistema servo integrado en China.
● Reemplazo perfecto para compresor de aire + filtro + válvula solenoide + válvula de mariposa + pinza neumática
● Vida útil de múltiples ciclos, consistente con el cilindro japonés tradicional



Parámetro de especificación
| Modelo n.° Z-EFG-C35 | Parámetros |
| Accidente cerebrovascular total | 35 mm ajustable |
| Fuerza de agarre | 15-50 N ajustable |
| Repetibilidad | ±0,03 mm |
| Peso de agarre recomendado | ≤1 kg |
| Modo de transmisión | Cremallera + Guía esférica |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,5 s |
| Modo de movimiento | Dos dedos se mueven horizontalmente |
| Peso | 0,5 kilos |
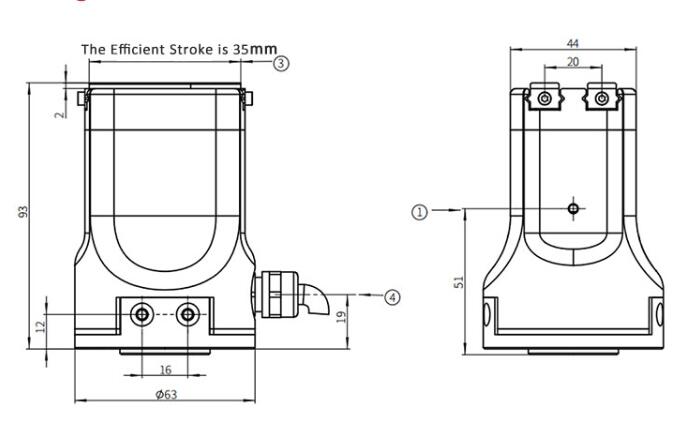
| Dimensiones (largo x ancho x alto) | 63*63*95 mm |
| Voltaje de funcionamiento | 24 V ± 10 % |
| Corriente nominal | 0,3 A |
| Corriente pico | 1A |
| Fuerza | 8W |
| Clase de protección | IP20 |
| Tipo de motor | CC sin escobillas |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80 (Sin escarcha) |

| Carga estática admisible en dirección vertical | |
| Fz: | 150 N |
| Par admisible | |
| Mx: | 2,5 Nm |
| Mi: | 2 Nm |
| Sra.: | 3 Nm |
Conducción y controlador integrados en el interior
La pinza eléctrica Z-EFG-C35 tiene un sistema servo integrado en su interior, su carrera total es de 35 mm, la fuerza de sujeción es de 15-50 N, su carrera y fuerza de sujeción son ajustables y su repetibilidad es de ±0,03 mm.

Compatible con brazo robótico de seis ejes

El producto es compatible con el brazo robótico de 6 ejes, para realizar plug and play, el tiempo de carrera más corto es de solo 0,5 s, para cumplir con el requisito de sujeción rápida y estable para la línea de producción.
Tamaño pequeño, flexible para instalar

El tamaño del producto Z-EFG-C35 es de solo L63*W63*H95 mm, es pequeño y se puede instalar en entornos reducidos.


Reacción rápida y precisión para el control de la fuerza

Su tipo de movimiento es de 2 dedos paralelos, resistente al agua IP20, la parte de su sujeción del terminal se puede cambiar en cualquier momento, los clientes pueden ajustar la sujeción de acuerdo con el requisito de producción.
Múltiples modos de control, fácil de operar

La configuración del Z-EFG-C35 es sencilla, cuenta con abundantes modos de control, incluidos 485 (Modbus RTU), Pulso, E/S y es compatible con el sistema de control principal PLC.

Desplazamiento del centro de gravedad de la carga
Nuestro negocio



-300x2551-300x300.png)



