Pinzas eléctricas paralelas serie HITBOT Z-EFG-26



Categoría principal
Brazo robótico industrial / Brazo robótico colaborativo / Pinza eléctrica / Actuador inteligente / Soluciones de automatización
Solicitud
Las pinzas robóticas SCIC de la serie Z-EFG son de tamaño compacto e incorporan un servosistema que permite un control preciso de la velocidad, la posición y la fuerza de sujeción. El innovador sistema de agarre SCIC para soluciones de automatización le permitirá abrir nuevas posibilidades para automatizar tareas que nunca imaginó.

Característica
·Detección de caída de pinza, función de salida de área
·La fuerza, la posición y la velocidad se pueden controlar con precisión a través de Modbus
·Larga vida útil: decenas de millones de ciclos, superando a las garras de aire.
·Controlador integrado: tamaño reducido, fácil integración
·Modo de control: 485 (Modbus RTU), E/S
La fuerza de sujeción y la velocidad se pueden controlar con precisión mediante Modbus.
Aplicación múltiple
Tiene detección de caída de presión y salida de distrito.
Precisión para controlar
La fuerza de sujeción, la broca y la velocidad se pueden controlar mediante Modbus.
Larga vida útil
Ciclo de diez millones, sobre pinza neumática
Controlador incorporado
Ocupa poco espacio y es fácil de integrar.
Rápido para reaccionar
El tiempo más corto de un solo golpe es de solo 0,25 s.
Sujeción suave
Puede sujetar objetos frágiles, como huevos, vasos de vidrio, etc.




Parámetro de especificación
La Z-EFG-26 es una pinza paralela eléctrica de 2 dedos, de tamaño pequeño pero potente para agarrar muchos objetos blandos como huevos, tuberías, componentes electrónicos, etc.
● La pinza eléctrica Z-EFG-26 tiene un controlador incorporado.
●Su recorrido y fuerza de agarre son ajustables.
●Los terminales se pueden reemplazar para adaptarse a diversos requisitos.
●Recoge fácilmente objetos frágiles y deformables, como huevos, tubos de ensayo, anillos, etc.
●Adecuado para escenas sin fuentes de aire (como laboratorios y hospitales).
| Modelo n.° Z-EFG-26 | Parámetros |
| Total ataque | 26 mm |
| Fuerza de agarre | 6~15 N |
| Repetibilidad | ±0,02 mm |
| Peso de agarre recomendado | Máx. 0,3 kg |
| Transmisión modo | Cremallera + Guía de rodillos cruzados |
| Reposición de grasa de componentes móviles | Cada seis meses o 1 millón de movimientos/vez |
| Tiempo de movimiento de carrera unidireccional | 0,25 s |
| Rango de temperatura de funcionamiento | 5-55 °C |
| Rango de humedad de funcionamiento | RH35-80(Sin escarcha) |
| Modo de movimiento | Dos dedos se mueven horizontalmente |
| Control de accidentes cerebrovasculares | Ajustable |
| Ajuste de la fuerza de sujeción | Ajustable |
| Peso | 0,45 kilogramos |
| Dimensiones(Largo x Ancho x Alto) | 55*26*97 mm |
| Ubicación del controlador | Incorporado |
| Fuerza | 10 W |
| Tipo de motor | CC sin escobillas |
| Corriente máxima | 1A |
| Tensión nominal | 24 V |
| Corriente de espera | 0,4 A |
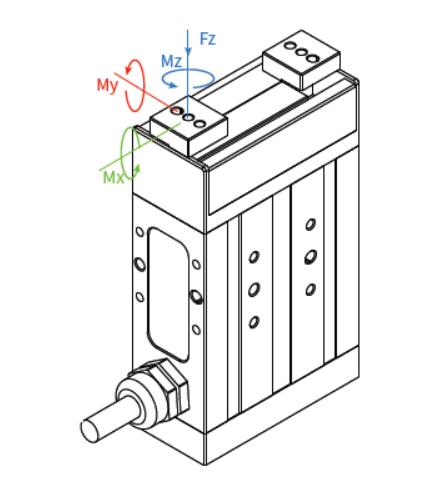
| Carga estática admisible en dirección vertical | |
| Fz: | 250 N |
| Par admisible | |
| Mx: | 2,4 Nm |
| Mi: | 2,6 Nm |
| Sra.: | 2 Nm |
Control de fuerza de precisión Exactitud para repetir

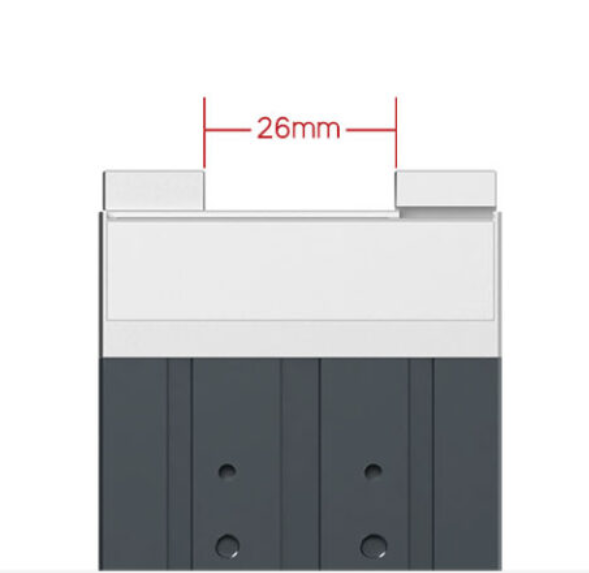
La pinza eléctrica ha adoptado un diseño de transmisión especial y un cálculo de conducción para compensar, su carrera total es de 26 mm, la fuerza de sujeción es de 6-15 N, la carrera y la fuerza de sujeción se pueden ajustar y su repetibilidad es de ±0,02 mm.
Reacción rápida, más estable

El tiempo más corto de una sola carrera es de solo 0,25 s, lo que puede satisfacer el requisito de sujeción rápida y estable para la línea de producción.
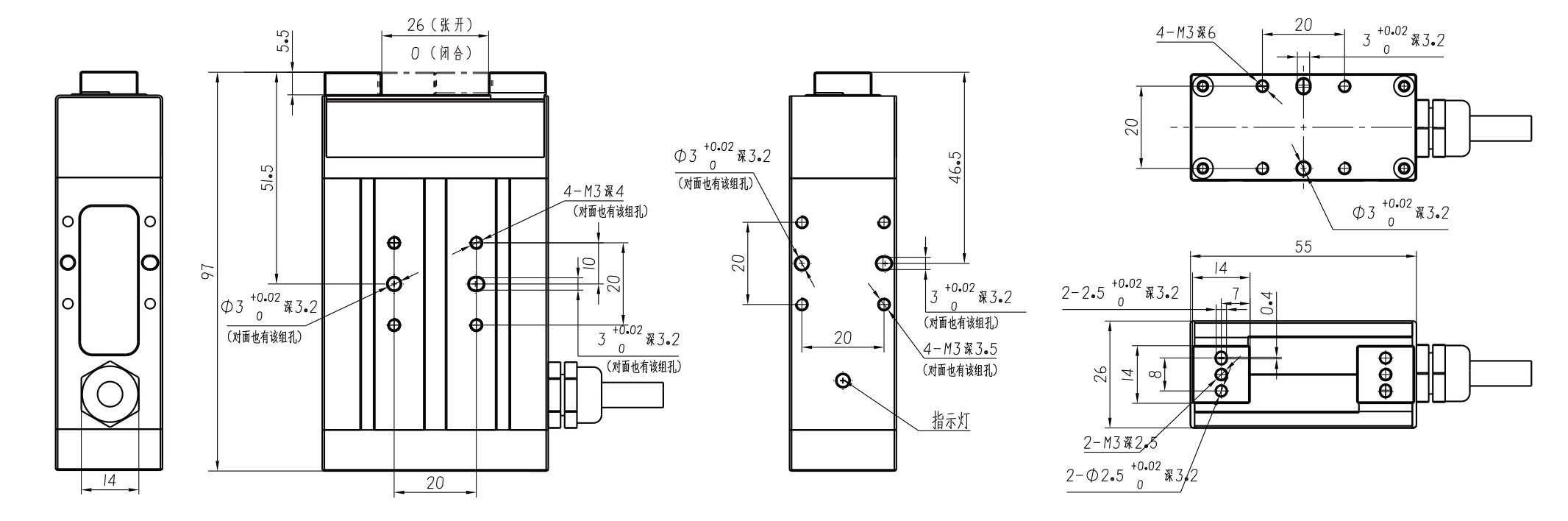
Figura pequeña, fácil de integrar

El tamaño de Z-EFG-26 es L55*W26*H97mm, su estructura es compacta, admite más de cinco modos de instalación flexibles, tiene un controlador incorporado, ocupa poco espacio y puede realizar fácilmente muchas tareas para varios requisitos de sujeción.

Conducción integrada y controlador de sujeción suave

La parte de la cola de la pinza eléctrica se puede cambiar fácilmente, su peso de sujeción es de 300 g, los clientes pueden diseñar especialmente la parte de la cola de la pinza para cumplir con sus propios objetos de sujeción, para mantener la pinza eléctrica puede completar las tareas de sujeción en la mayor medida posible.
Modos de control múltiple, fácil de operar

La configuración de la pinza Z-EFG-26 es sencilla, tiene abundantes modos de control: 485 (Modbus RTU), Pulso, E/S, es compatible con el sistema de control principal PLC.

Diagrama de instalación de dimensiones
Nuestro negocio







